myCobot 摄像模组 v2.0
适配型号:myCobot 280、myPalletizer 260、mechArm 270
产品图示

规格说明:
| 名称 | myCobot 摄像模组 v2.0 |
|---|---|
| 型号 | myCobot_cameraHolder_J6 |
| 颜色 | 白色(默认) |
| 材料 | ABS 注塑 |
| 尺寸 | 836416 |
| USB 协议 | USB2.0 HS/FS |
| 镜头焦距 | 标配 1.7mm |
| 视场角度 | 约 60° |
| 支持的系统 | Win7/8/10、Linux、MAC |
| 使用寿命 | 两年 |
| 固定方式 | 乐高连接件 |
| 使用环境要求 | 常温常压 |
| 适用设备 support | ER myCobot 280 系列 ,ER myPalletizer 260 系列, ER mechArm 270 系列, ER myBuddy 280 系列 |
摄像头法兰 : 机器视觉
简介
- USB 高清摄像头可搭配吸泵、自适应夹爪、人工智能套装等,eye in hand 实现精确定位与标定。
安装使用
检查配件包东西是否齐全:乐高连接件、带 usb 线的摄像头模组

摄像头安装:
结构安装:
将乐高连接件插入摄像模组预留的插孔中:

将插好连接件的摄像模组对准机械臂末端插孔插入:

电气连接:
- 将 USB 线插入底座 USB 接口:

- 将 USB 线插入底座 USB 接口:
编程开发:
使用 python 对摄像模组进行编程开发 python 环境下载
新建 python 文件:
Ctrl + Alt + T打开命令行,输入:gedit camera.py
文件名字可以根据需要修改
进行功能编程:
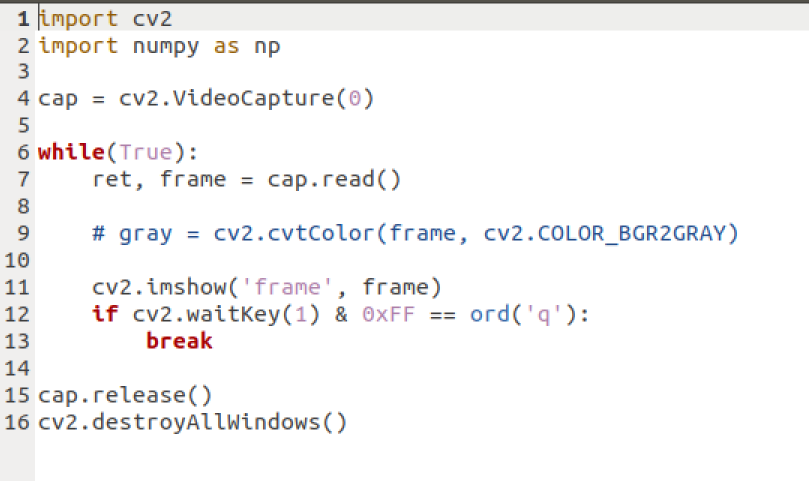
代码如下:
import cv2 import numpy as np cap = cv2.VideoCapture(0) # “0”,根据查询到的摄像设备号来定 while(True): ret, frame = cap.read() # gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY) cv2.imshow('frame', frame) if cv2.waitKey(1) & 0xFF == ord('q'): break cap.release() cv2.destroyAllWindows()保存文件并关闭,返回命令行终端,输入:
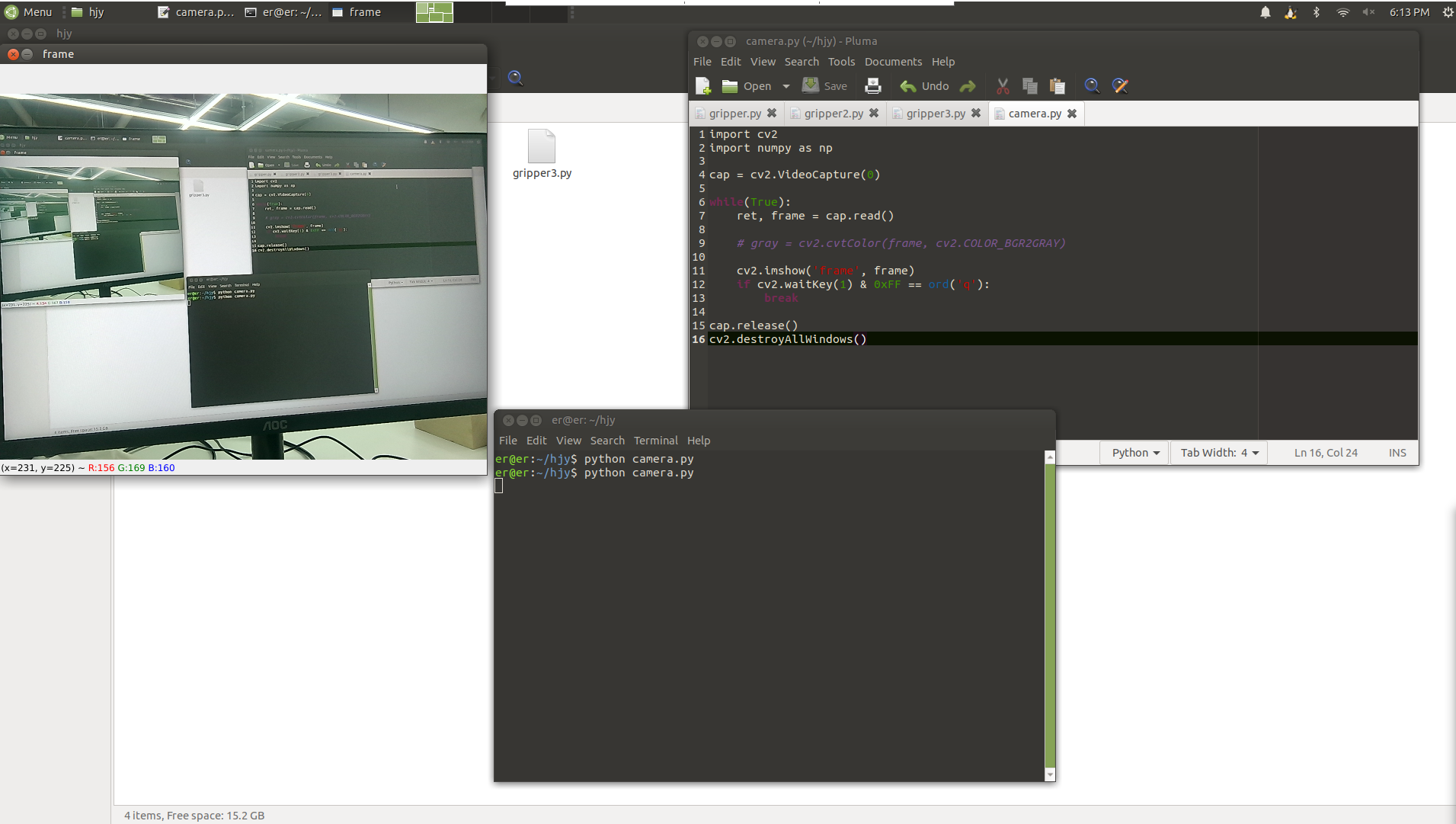
python camera.py
可以看到摄像头捕捉到的画面
运行结果:
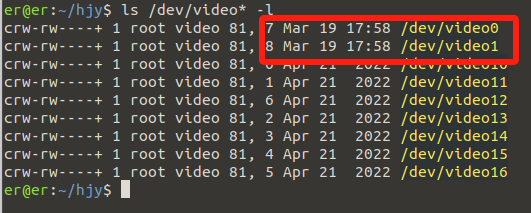
如何查询摄像头设备号
ls /dev/video* -l
可以通过插拔设备分别使用命令,观察新增的设备号来确认。
示例结果: